La robótica cuántica avanza. Los científicos intentan desarrollar instrucciones lógicas suficientemente flexibles para que los ordenadores sean capaces de aprender por si mismos y de esta manera prever con mayor precisión. El 'cuando tu vas yo vengo' será posiblemente el patrón de 'pensamiento' cibernético más usual en el futuro de las relaciones con los humanos, los pilares del próximorobot humanoide se están construyendo. A imagen y semejanza del ser humano.
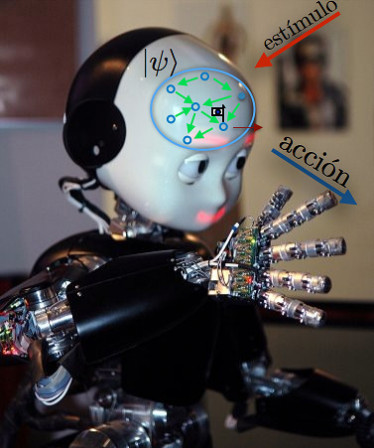
Investigadores de la Universidad Complutense de Madrid(UCM) y la Universidad de Innsbruck (Austria) publican un trabajo en la revista 'Physical Review X' donde auguran que la computación cuántica abre nuevos desarrollos en el campo de la robótica y en aquellos relacionados con la Inteligencia Artificial(IA). Por primera vez estos científicos han demostrado que las máquinas cuánticas se adaptan a situaciones donde las clásicas no terminan los procesos de aprendizaje y respuesta. Estos investigadores afirman que las máquinas cuánticas pueden responder de forma óptima y más rápida a la hora de actuar frente al entorno que las rodea, publica Sinc